|
|
Bain page: The YMFC-32 autonomous quadcopters that I use.
The YMFC-32 autonomous quadcopters that I use
During the development of the YMFC-32 autonomous software I used 2 quadcopters to make sure that the software will work on various systems. In the table below you can find some specs of the systems.
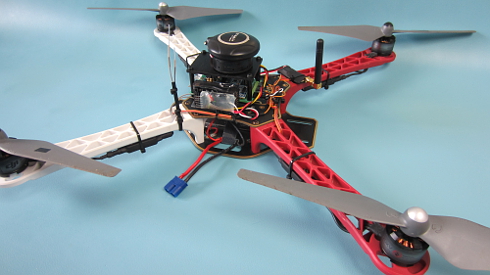
Quadcopter 1 - parts as listed on my website
 Click to see the full image Click to see the full image
| Circuit | DIY / prototype board |
| Weight without battery | 768gr / 1.69lb |
| Weight with battery | 1077gr / 2.37lb |
| Propellers | 8x4.5 (8045) |
| Flight time | 15 minutes |
| Battery | 3 cell / 3800mAh (309gr / 0.68lb) |
| Motors | A2212/13T 1000kV |
| ESC's | No name 30A |
| Frame | DJI FlameWheel 450 |
| Transmitter | Flysky T6 with PWM to PPM converter |
Quadcopter 2 - Advanced ESC's and motors
 Click to see the full image Click to see the full image
| Circuit | Manufactured PCB |
| Weight without battery | 770 gram / 1.69lb |
| Weight with battery | 1079gr / 2.37lb |
| Propellers | 9.4x4.3 (9443) |
| Flight time | 20 minutes |
| Battery | 3 cell / 3800mAh (309gr / 0.68lb) |
| Motors | DJI 2212 / 920kV |
| ESC's | DJI E300 OPTO |
| Frame | DJI FlameWheel 450 |
| Transmitter | Futaba T14SG with S.Bus to PPM converter |

|
|
|

